![]()
一款适用于ROS和Arduino的低成本高性能机械手臂

什么是「Open Manipulator」?
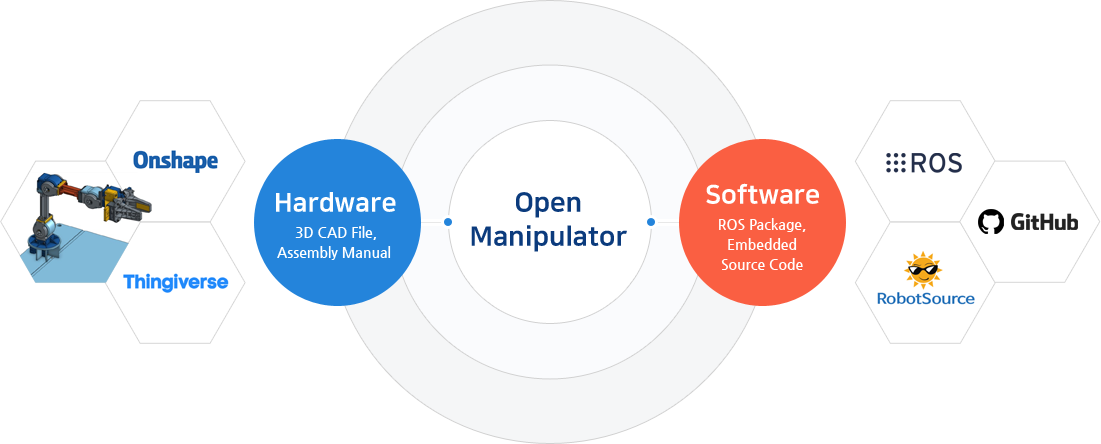
Open Manipulator是一种可以为开发提供开源CAD、软硬件设计以及公共资源的机器人平台。
主要特点
- ▪ 合理的价格、高重复性和能经受最大500g的负载
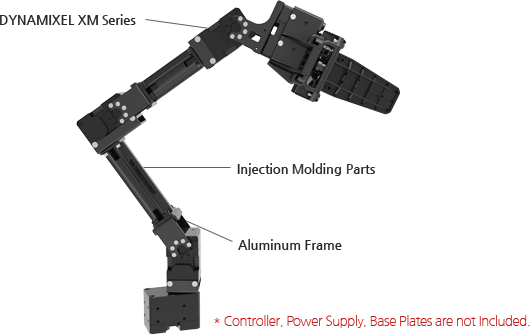
- ▪ 带反馈的精密伺服控制(DYNAMIXEL-X 系列)
- ▪ 模块化结构和一体化设计
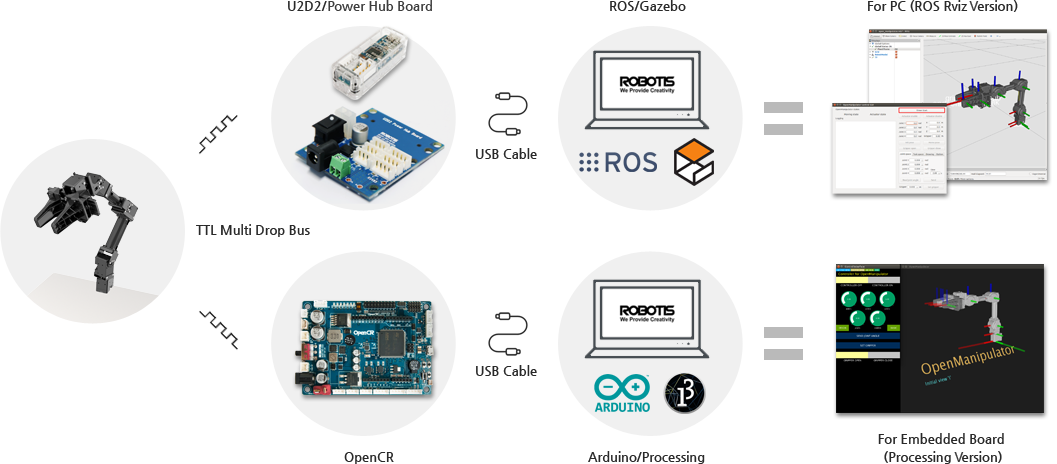
- ▪ 易于与 PC 或嵌入式板连接使用
- ▪ 开源硬件(CAD)和软件(SDK)
- ▪ 可轻松与移动机器人平台集成的轻量化设计
产品规格
Model Name |
RM-X52 | |
Actuator |
- | XM430-W350-T |
Input Voltage |
V | 12 |
DOF |
- | 5 (4 DOF + 1 DOF Gripper) |
Payload |
g | 500 |
Speed(Joint) |
RPM | 46 |
Weight |
kg (lb) | 0.70 (1.54) |
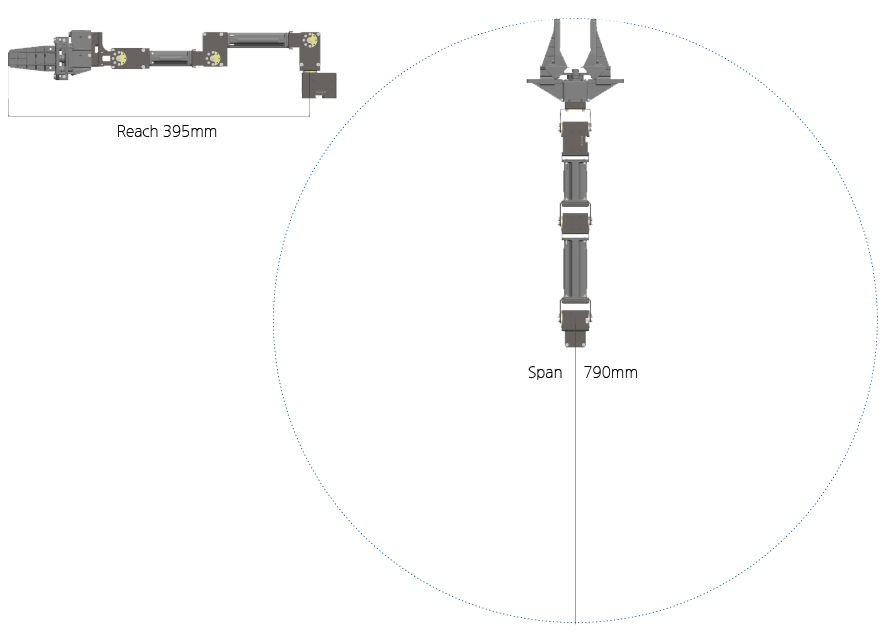
Reach |
mm (in) | 380 (14.9) |
Gripper Stroke |
mm (in) | 20~75 (0.79~2.95) |
| Communication | - | TTL (Level Multidrop BUS) |
| Software | - | ROS, DYNAMIXEL SDK, Arduino, Processing |
OpenManipulator |
Industrial |
Competitor |
||
| Programming Environment | ROS(gazebo, Movelt!) | ○ | △ |
Χ |
| Arduino IDE | ○ | Χ | △ | |
| Motor Control | Position Control | ○ | ○ | ○ |
| Current Control | ○ | △ | Χ | |
| Hardware Customizing | Interchangeable End-Effector | ○ | ○ | ○ |
| Expandable DOF | ○ | Χ | Χ | |
| Compatible with Mobile platform | ○ | △ | △ | |
| Software Customizing | Kinematics | ○ | Χ | Χ |
| Motor Controller | ○ | Χ | Χ | |
| Trajectory | ○ | △ | Χ | |
| Application | Pick and place | ○ | ○ | ○ |
| Teleoperation | ○ | ○ | ○ | |
| Camera Application | ○ | ○ | ○ |
工作空间
开发环境
可以使用MathWorks MATLAB SDK。
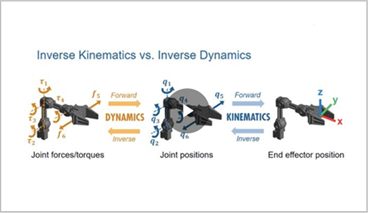
机械手的算法设计

机械手的关节控制
主要功能
桌面机械手
移动式机械手

相机应用
各种终端工具
IEEE Spectrum推荐的开源机器人平台!

OpenManipulator作为多功能的开源机器人平台,无论你是对运动规划、物体抓取、机器人运动学还是移动操作感兴趣,都可以轻松地使用它。
#Link 1 : Robot Gift Guide 2018
#Link 2 : AMBIDEX Cable-Driven Robot Arm, and More