![]()
经济实惠的多用途机械手臂
研究开发与教育学习均可使用
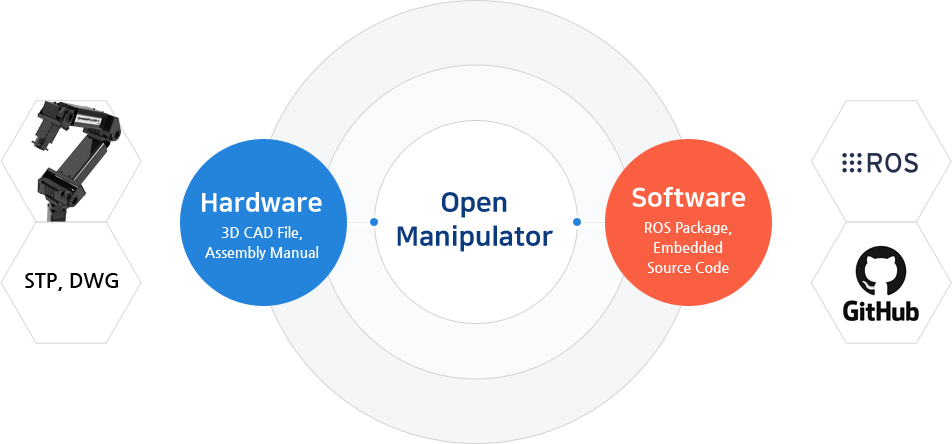
什么是"OpenMANIPULTOR-P"?
ROBOTIS 提供开源 CAD、软硬件设计资料以及相关公共资源,使开发机械手臂变得更加轻松。
主要特点
- ▪ 可由用户直接编程的开源机械手系统
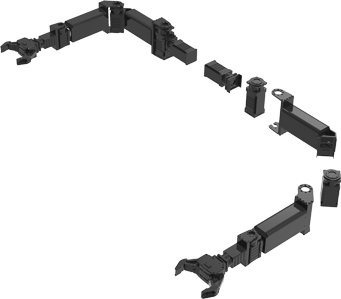
- ▪ 易于维护和定制模块化平台
- ▪ 无外部控制箱,提供最佳的重量/有效载荷比

产品规格
Product Name |
OpenMANIPULATOR-P |
Model Name |
RM-P60-RNH |
DYNAMIXEL-P |
PH54-200-S500-R x2 PH54-100-S500-R x2 PH42-020-S300-R x2 |
DOF |
6 |
Payload (kg) |
3 |
Repeatability (mm) |
±0.05 |
Speed (Each joint, deg/sec) |
180 |
Weight (kg) |
5.5 |
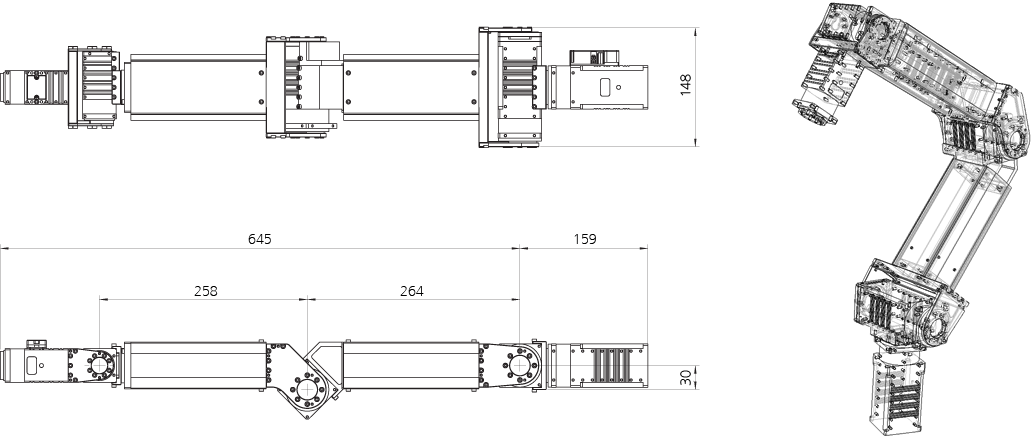
Reach (mm) |
645 |
| Rated Voltage (VDC) | 24 |
| Communication | RS-485 (Multi Drop Bus) |
| Software | ROS (Ubuntu Linux) |
| Controller | PC (Not Included) |
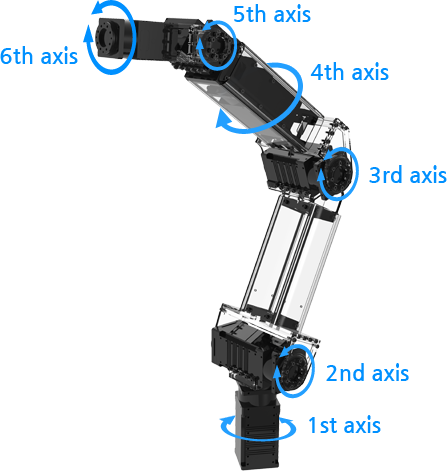
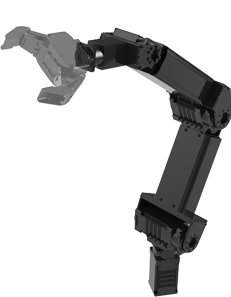
关节设置及机械结构
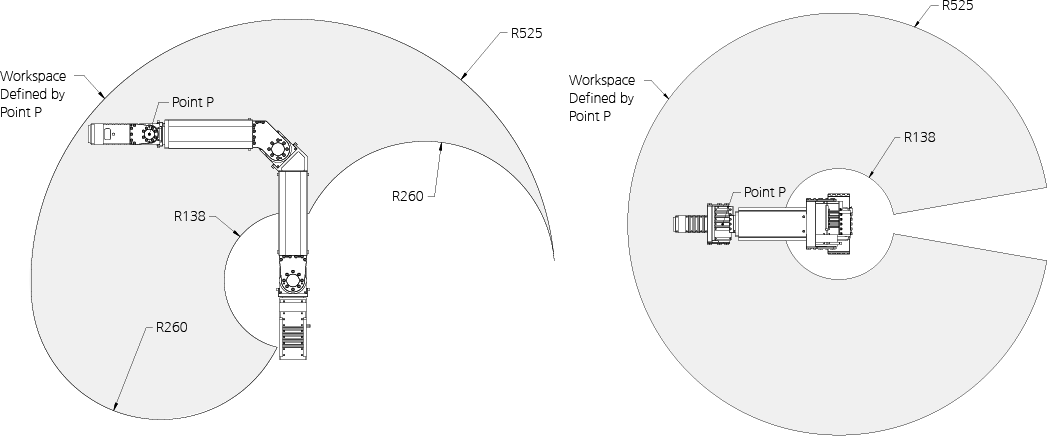
规格图纸
工作区半径
使用示例
物体抓取&放置(RH-P12-RN)
双臂机械手系统
开发环境

● 电子手册 (http://emanual.robotis.com/docs/en/platform/openmanipulator_pro/overview/)
- - 概述
- - 规格
- - 开始
- - [ROS] 设置
- - [ROS] 机械手管理器
- - [ROS] 操作
- - [ROS] 仿真