![]()
RH-P12-RN

1个自由度、2个指环结构的基本型机械手
以10W DC马达为动力的双手指多功能机械手

自适应抓握设计
手指具有良好的自适应性,能轻松稳定地抓取各种形状的物品。
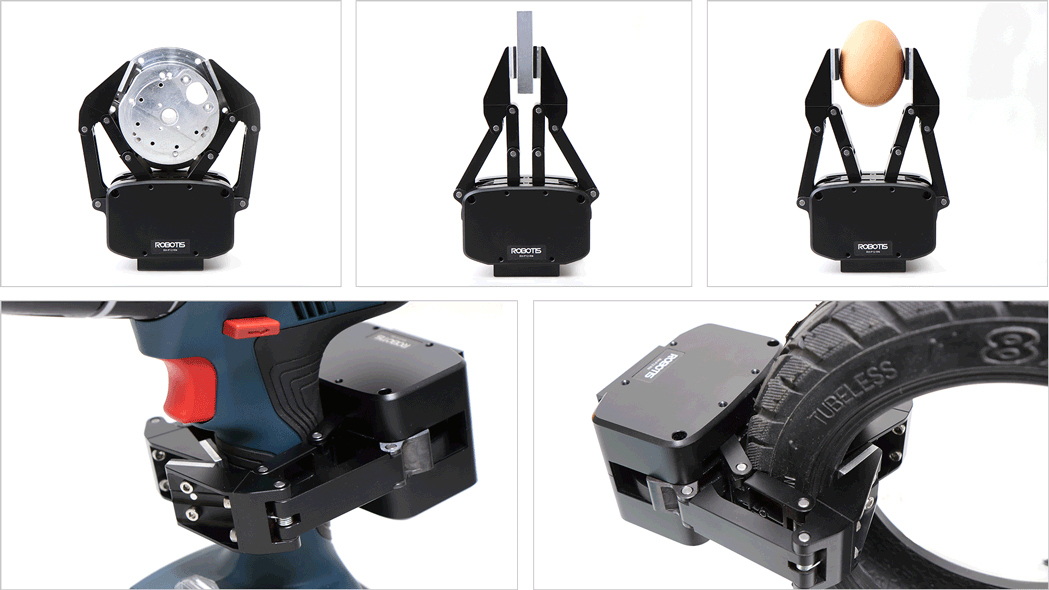
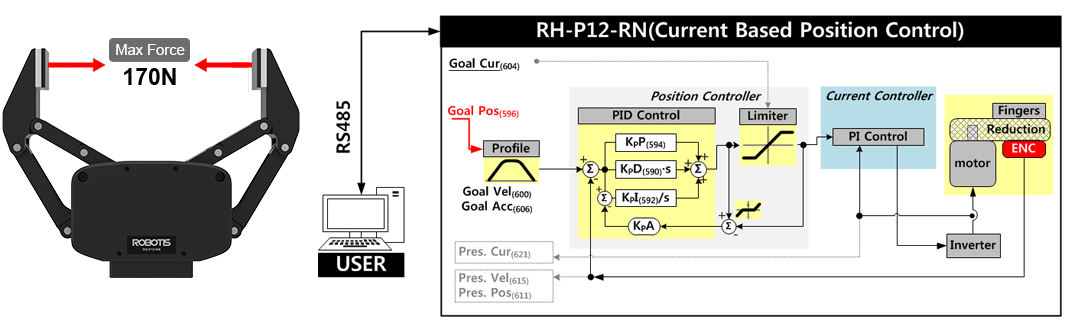
电流控制(功率控制)
通过扭矩调节和基于电流的位置控制,可以拾取多种材质的物体。
轻巧&大功率
500克超轻量机械臂,可承载最高5公斤的有效载荷。

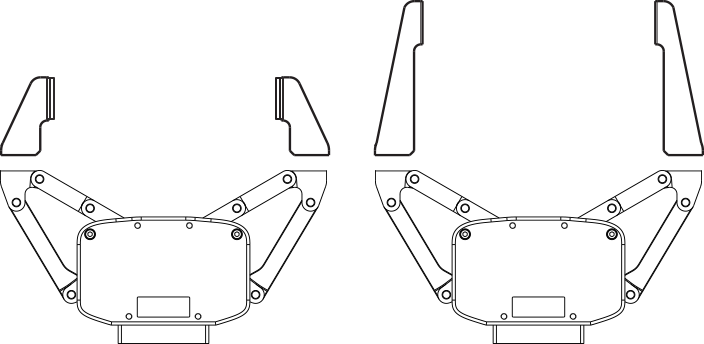
可拆卸性指尖
指尖可随时拆卸,轻松更换为其他类型指尖或是定制指尖。
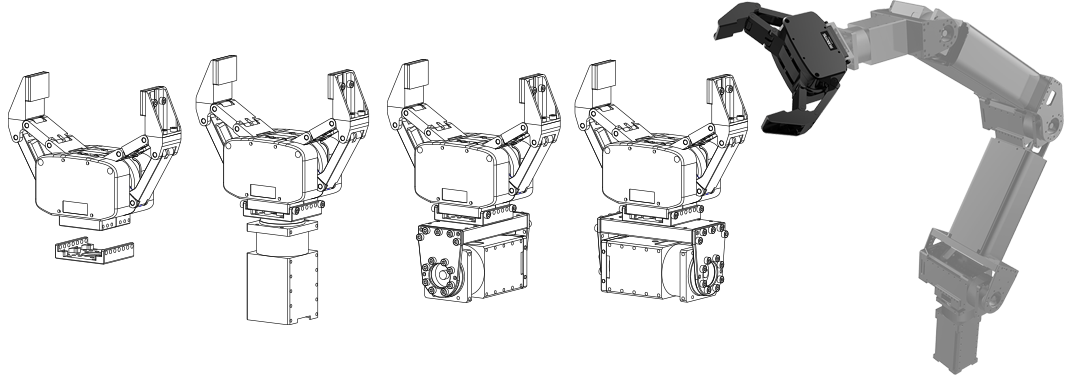
直观、简单的安装
▪ 简化的设计,可轻松连接安装到各种实际应用中。
▪ 可通过OpenMANIPULATOR-P & Universal Robots e-Series 进行快速安装。

DYNAMIXEL 2.0协议
▪ 机械手支持DYNAMIXEL 2.0,便于控制。
▪ 通过DYNAMIXEL BUS连接电源和实现通信。

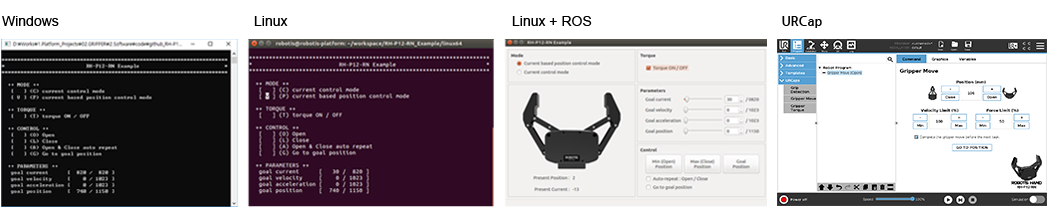
支持多种开发环境
▪ 提供Windows、Linux、ROS系统的C++例程
▪ 支持通用机器人的URCAP S/W。
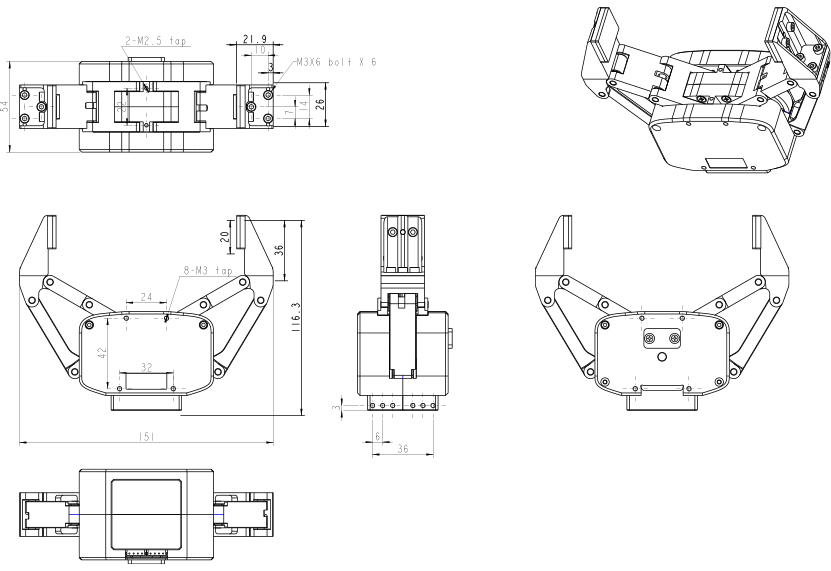
机械信息
产品规格
| Properties | Data |
Weight |
500 g |
Recommended Payload |
5 kg |
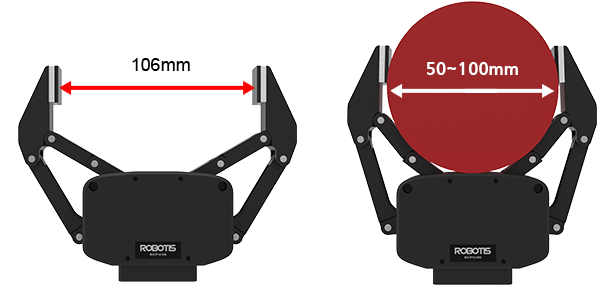
Maximum Stroke |
106 mm |
Diameter for Encompassing Grip |
50 ~ 100 mm |
Maximum Gripping Force |
170 N |
Protocol |
DYNAMIXEL 2.0 |
Nominal Voltage |
24V |
Network Interface |
RS-485 |
产品名称

