
![]()
人工智能研究从这里开始
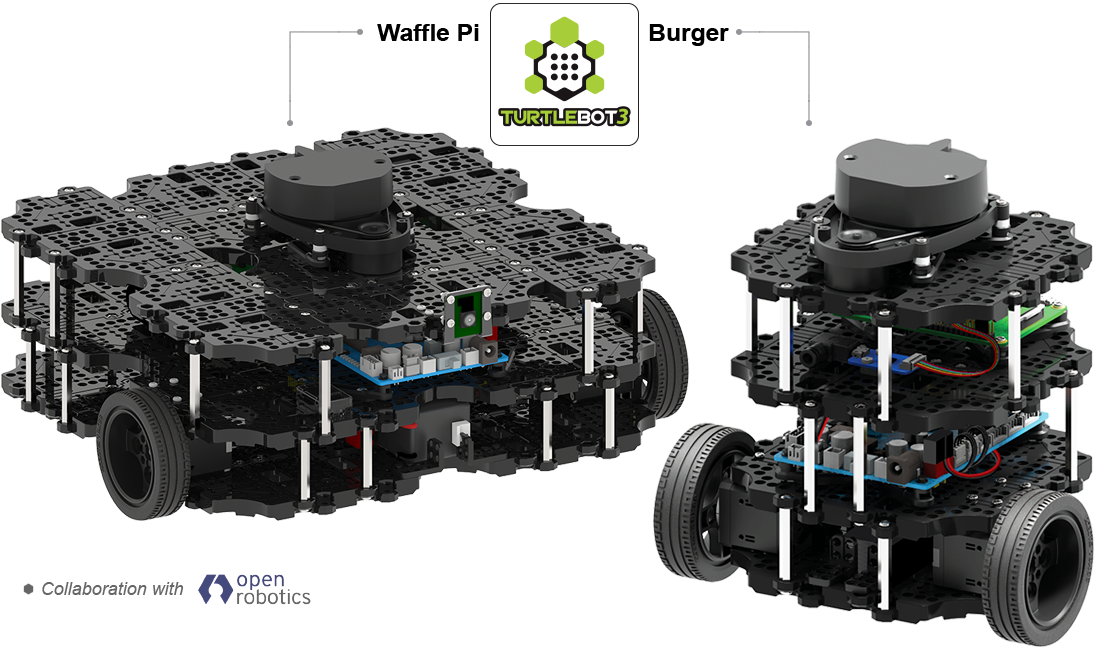
ROS官方平台
TurtleBot3是新一代的模块化和创意多元化的小型开放式移动机器人平台
让我们探索ROS并为教育、研究和产品开发创建令人兴奋的应用程序。
特点
 |
世界上最受欢迎的ROS平台 TurtleBot是世界上最受欢迎的开源机器人用于教育和研究。 |
 |
低成本 TurtleBot是用于教育和原型研发的最经济的平台。 |
 |
小尺寸 它的大小是TurtleBot1和2的1/4大小, 可以在背包里携带到任何地方 |
 |
结构可扩展性 TurtleBot3鼓励用户使用一些替代选项自定义其机械结构:开源嵌入式板(作为控制板),计算机和传感器。 |
 |
模块化舵机 TurtleBot3通过使用2个Dynamixels在车轮关节上获得精确的空间数据,易于组装、维护、更换和重新配置。 |
 |
开放软件 提供各种开源软件给用户使用。可以修改下载的源代码并与您的朋友共享。 |
 |
开放硬件 电路图、PCB Gerber、BOM和3D CAD数据全部向用户开放。 |
 |
强大的传感器 增强型360°激光雷达、高效率的树莓派相机、九轴惯性测量装置和精确编码器。 |
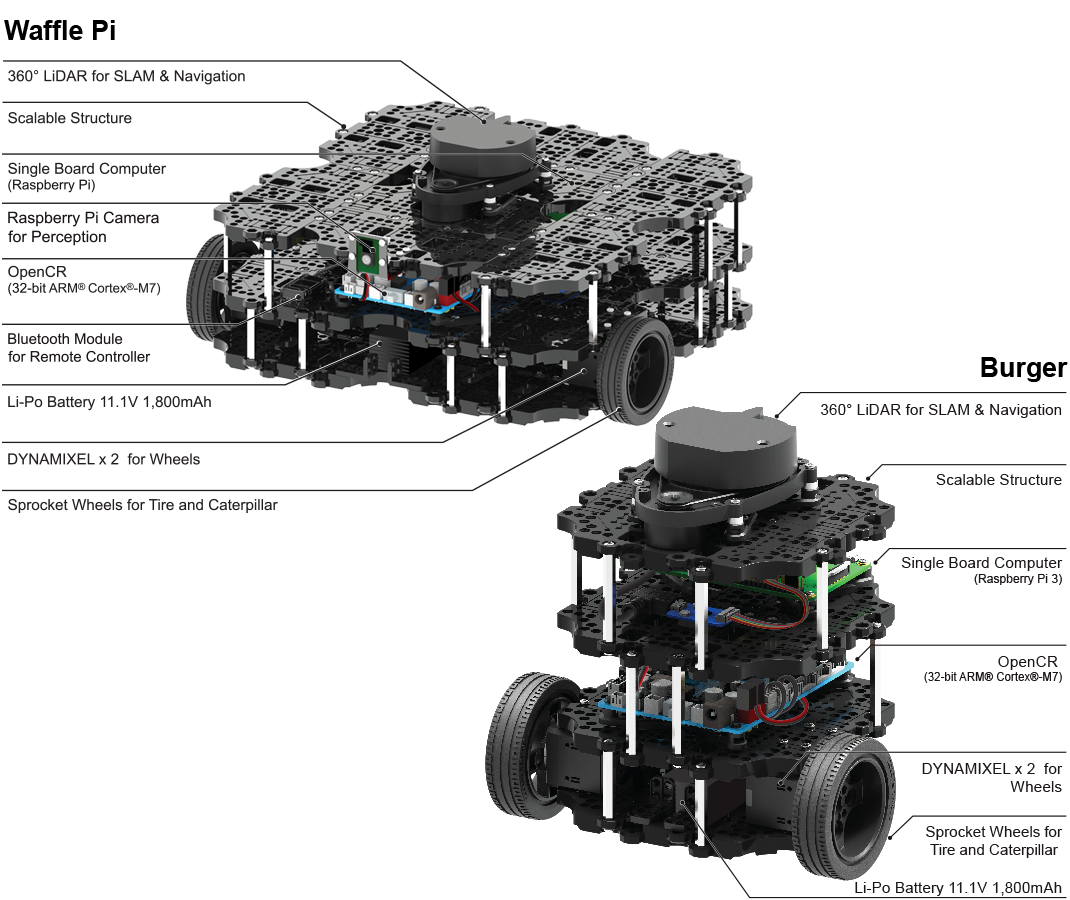
主要部件
Specification
项目 |
Waffle Pi |
Burger |
| 最大平移速度 | 0.26m/s | 0.22m/s |
| 最大转速 | 1.82rad/s (104.27 deg/s) | 2.84rad/s (162.72 deg/s) |
| 最大有效载荷 | 30kgs | 2.84rad/s (162.72 deg/s)15kgs |
| 尺寸(长x宽x高 | 281mm × 306mm × 141mm | 138mm × 178mm × 192mm |
| 重量 (+ SBC +电池+传感器) | 1.8kgs | 1kg |
| 预计运行时间 | About 2hr | About 2hr 30m |
| 预计充电时间 | About 2hr 30m | About 2hr 30m |
| DYNAMIXEL舵机 | XM430-W210-T | XL430-W250-T |
| SBC | Raspberry Pi 3 | Raspberry Pi 3 |
| 传感器 | Raspberry Pi Camera 360°LiDAR 3-Axis gyroscope 3-Axis accelerometer 3-Axis magnetometer |
360°LiDAR 3-Axis gyroscope 3-Axis accelerometer 3-Axis magnetometer |
树莓派 Model B |
树莓派 相机 Module V2 |
360°激光雷达 |
 |
 |
 |
| ▪ CPU : Quad Core 1.2GHz ▪ 1GB RAM ▪ Wireless LAN and BLE on board ▪ External Ports |
▪ Size : 25 × 24 × 9 mm ▪ Still Resolution : 8Megapixels ▪ Video modes : Max 1080p30 ▪ Sensor : Sony IMX219 |
▪ Detection distance : 120mm ~ 3,500mm ▪ Angular Range : 360° ▪ Angular Resolution : 1° |
Homepage http://www.turtlebot.com
E-Manual http://emanual.robotis.com/
Github https://github.com/ROBOTIS-GIT/turtlebot3
Community https://discourse.ros.org





 产品介绍
产品介绍