![]()
Open Platform Humanoid Project
ROBOTIS - OP (Dynamic Anrthropomorphic Robot with Intelligence - Open Platform, 动态智能拟人机器人 - 开源平台) 是一个价格适宜的小型类机器人品台,它拥有先进的计算能力, 尖端传感器,高负载能力和动态移动能力,来进行许多激动人心 的研究,教育活动。


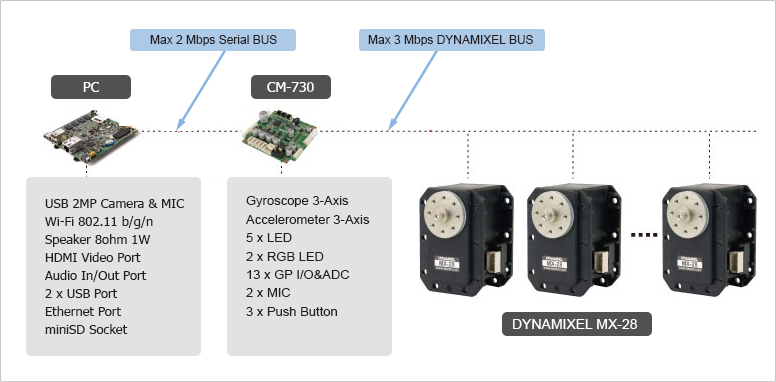
基于标准PC的机器人,具有通用接口
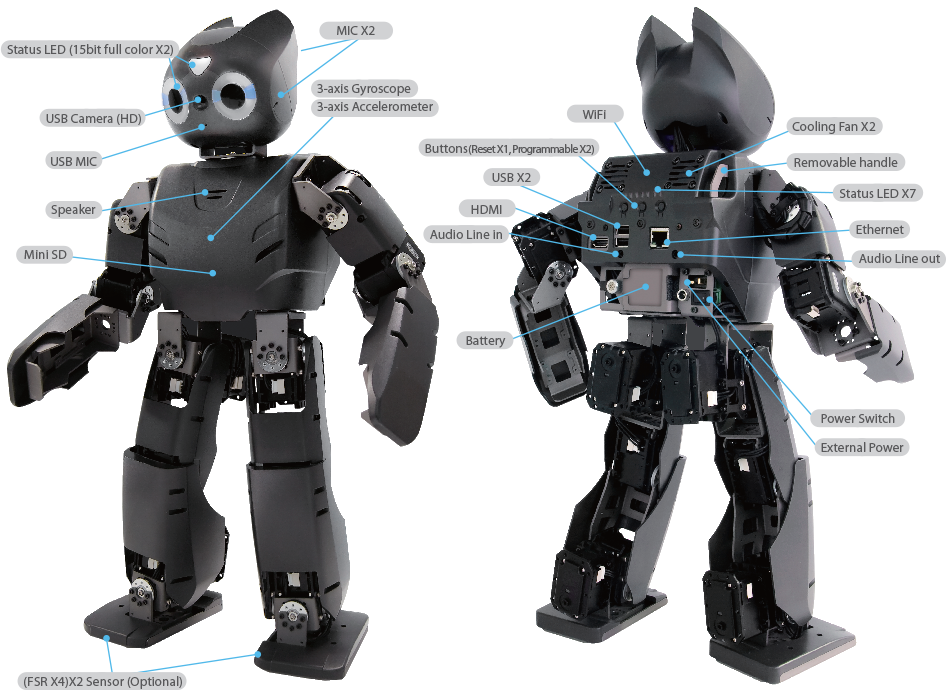
优越性能和先进功能
高效多功能模块设计

简洁的结构
开源平台

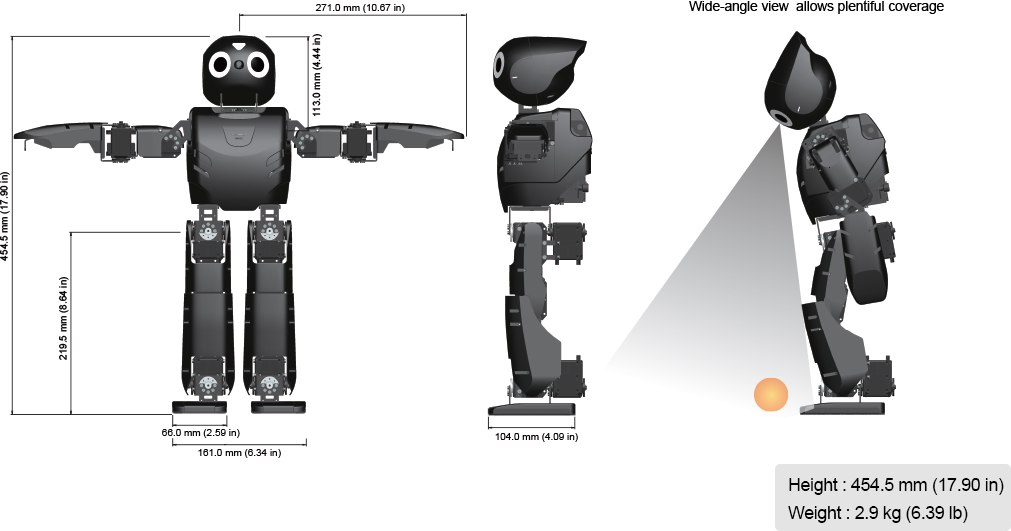
Dimensions and Weight




 产品介绍
产品介绍