![]()
用于教学,研究ROS和Arduino的
低成本机械臂
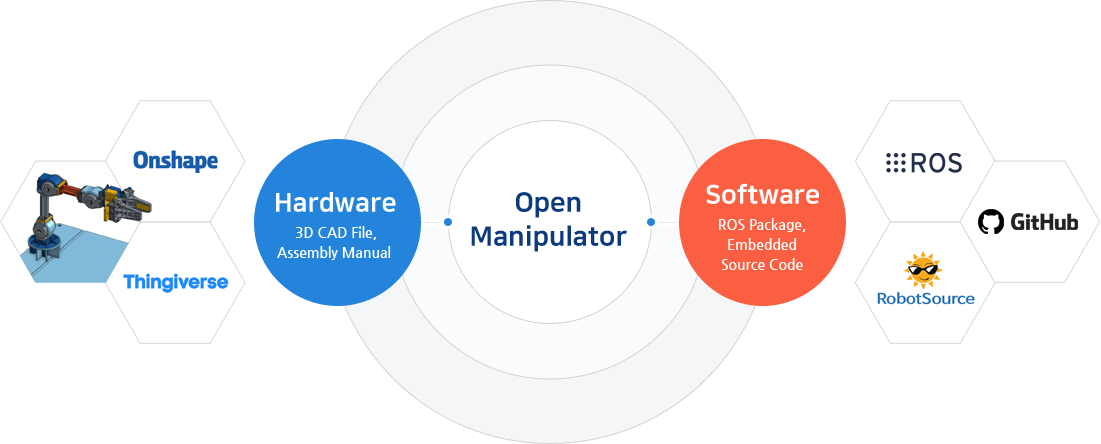
什么是“Open Manipulator”?
提供开源CAD,软件,硬件设计和公共资源的开发。
特点
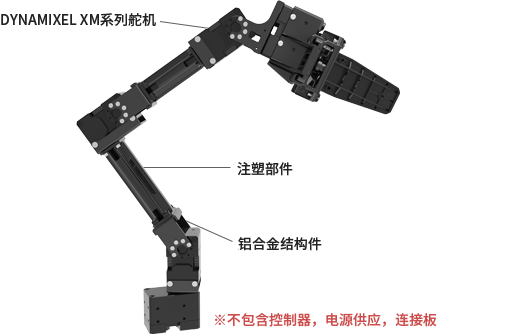
参数
OpenManipulator-X |
RM-X52 | |
舵机名称 |
- | XM430-W350-T |
电压 |
V | 12 |
自由度 |
- | 5 (4 DOF + 1 DOF Gripper) |
负载 |
g | 500 |
速度(关节) |
RPM | 46 |
重量 |
kg (lb) | 0.70 (1.54) |
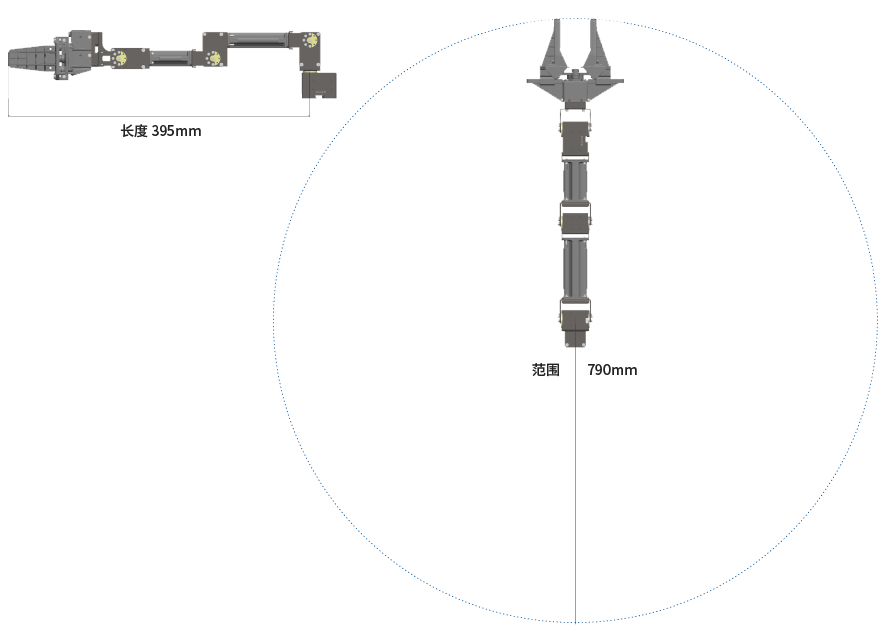
长度 |
mm (in) | 380 (14.9) |
爪力 |
mm (in) | 20~75 (0.79~2.95) |
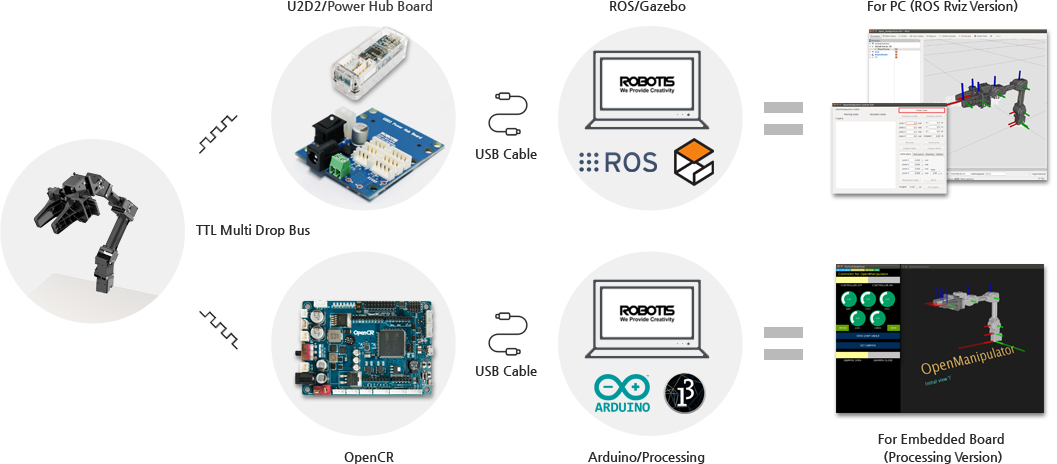
| 通讯 | - | TTL (Level Multidrop BUS) |
| 软件 | - | ROS, DYNAMIXEL SDK, Arduino, Processing |
OpenManipulator |
工业 |
竞争对手 |
||
| 程序设计环境 | ROS(gazebo, Movelt!) | ○ | △ |
Χ |
| Arduino IDE | ○ | Χ | △ | |
| 电机控制 | 位置控制 | ○ | ○ | ○ |
| 电流控制 | ○ | △ | Χ | |
| 硬件定制 | 可互换末端执行器 | ○ | ○ | ○ |
| 可扩展自由度 | ○ | Χ | Χ | |
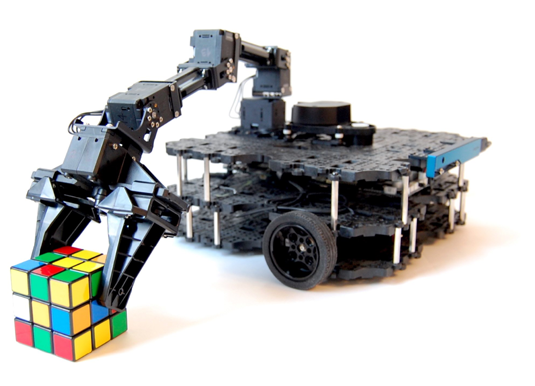
| 兼容移动平台 | ○ | △ | △ | |
| 软件定制 | 运动学 | ○ | Χ | Χ |
| 舵机控制 | ○ | Χ | Χ | |
| 轨迹 | ○ | △ | Χ | |
| 应用程序 | 抓取和放置 | ○ | ○ | ○ |
| 远程操控 | ○ | ○ | ○ | |
| 相机应用 | ○ | ○ | ○ |
工作空间
开发环境
可用MathWorks(科学技术语言)MATLAB SDK

Recommended by IEEE SPECTRUM

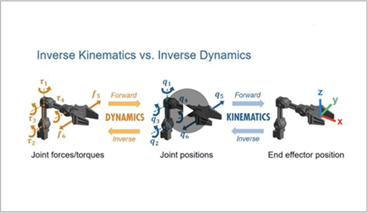
OpenManipulator is a versatile platform for anyone
interested in exploring motion planning, grasping,
kinematics, and mobile manipulation
#Link 1 : Robot Gift Guide 2018
#Link 2 : AMBIDEX Cable-Driven Robot Arm, and More




 产品介绍
产品介绍