
![]()
DYNAMIXEL-X系列多功能舵机
作为新品舵机,含高性能,网络化执行器模块,
被广泛用于制造多关节机器人,并具有稳定性和可扩展性。

基本特征
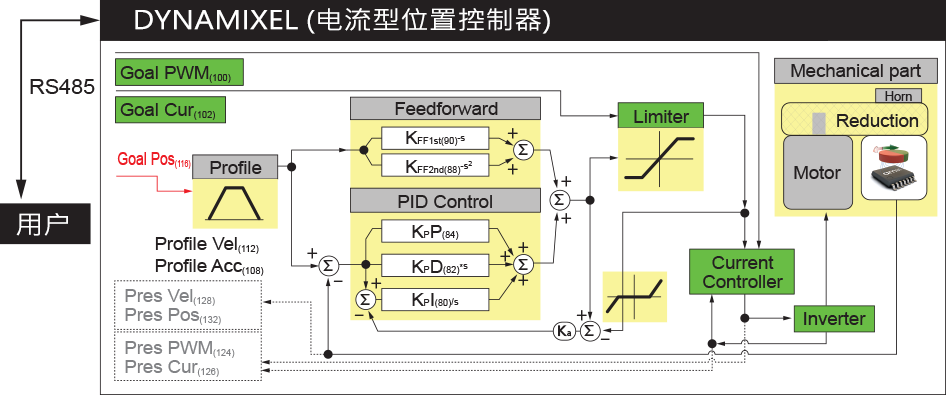
多种控制功能

精密的控制结构
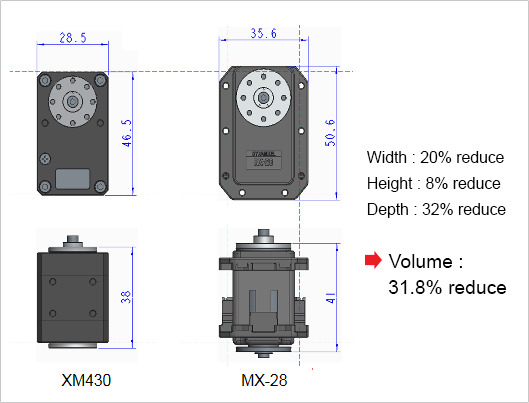
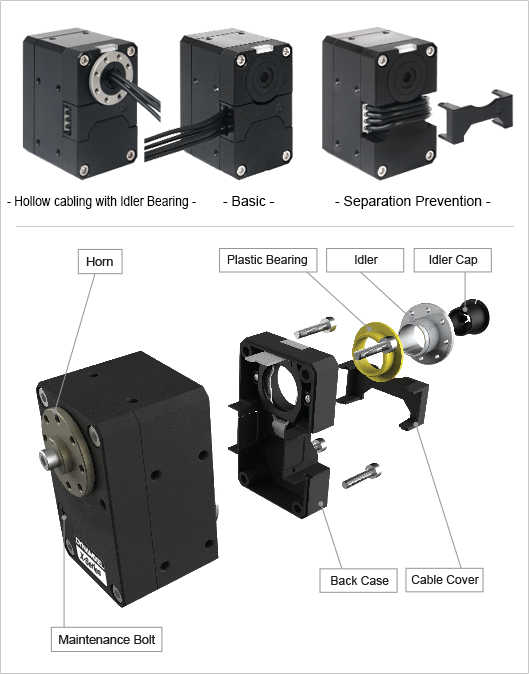
新品H/W结构
▪ 强化的扭矩,精巧的尺寸
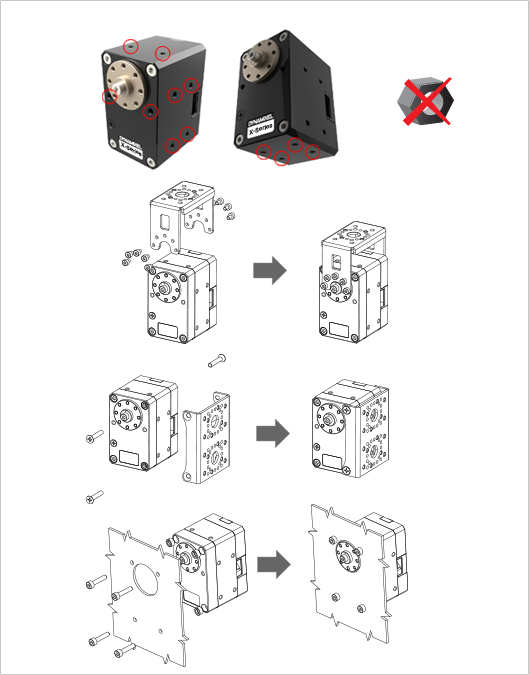
▪ 精密的设计
▪ 取消螺母的使用,直接用螺丝钉进行组装
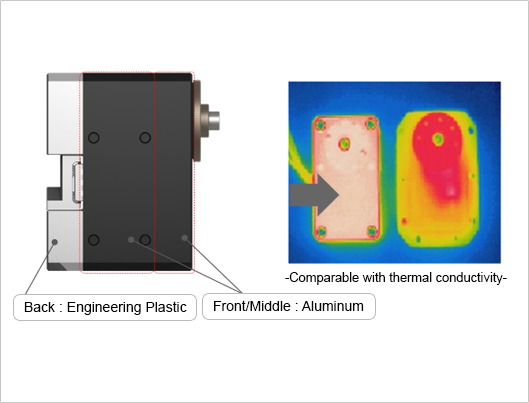
▪ 全身铝制外壳,改善散热效果,提高耐久性
▪ 创新的外壳设计将繁琐电路简化分布
▪ 电缆盖能防止电缆分离
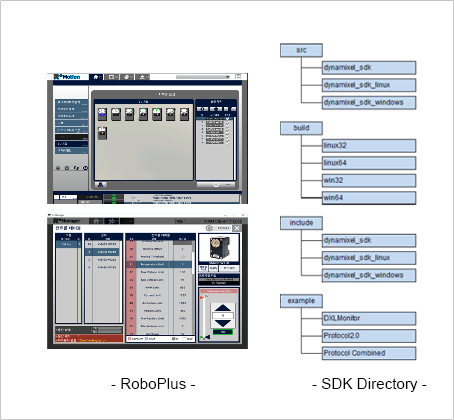
开发环境
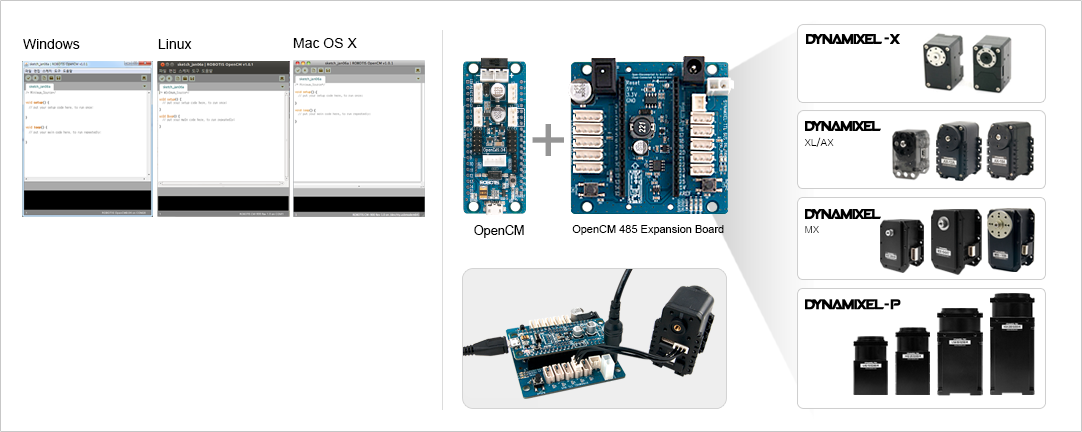
兼容设备
▪ PC+USB2Dynamixel / U2D2

▪ 嵌入式控制板
- ROBOTIS OpenCM系列 控制版
- 第三方控制板





 产品介绍
产品介绍