
![]()
可以用数字通信控制的机器人专用舵机

基本特征
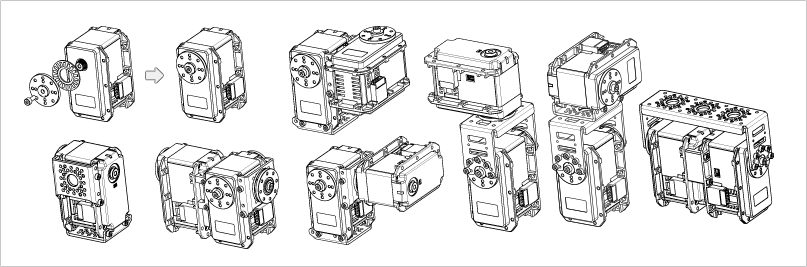
▪ 一体化机器人驱动系统
A module actuator which incorporates all the functions required for robot joints.

▪ 万能结合结构
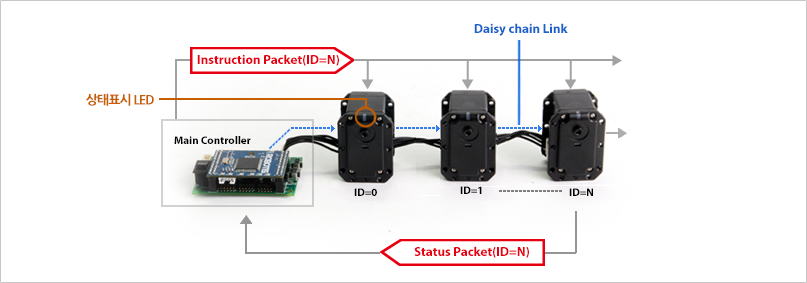
▪ 通信驱动
Dynamixel有本身的ID,并在同一组总线上由数据包通讯所控制,根据型号可支持TTL,RS485等通信类型。
▪ 简单的的连接结构
用总线方式进行连接,排线简单、扩展性好。
▪ LED工作状态显示功能、提醒功能
高压、超负荷、过电压、低电压时,可设置LED, 关断(关闭力矩)。
▪ 柔量设置
可以控制Compliance margin、调节目标位置附近的增减速常数。
▪ PID增益控制
可用比例增益, 积分增益, 微分增益进行控制。(MX-系列)
▪ 扭矩设置
从最大扭矩到完全没有扭矩的free run状态区间之间,可设置1024个阶段的扭矩。
▪ 低电流/高电压驱动
由于以高电压来驱动因此效率高、消耗电流小所以可以提高Dynamixel构成的机器人系统的稳定性。
MX-系列的特点

控制器
使用专用控制器和PC可以方便控制Dynamixel。
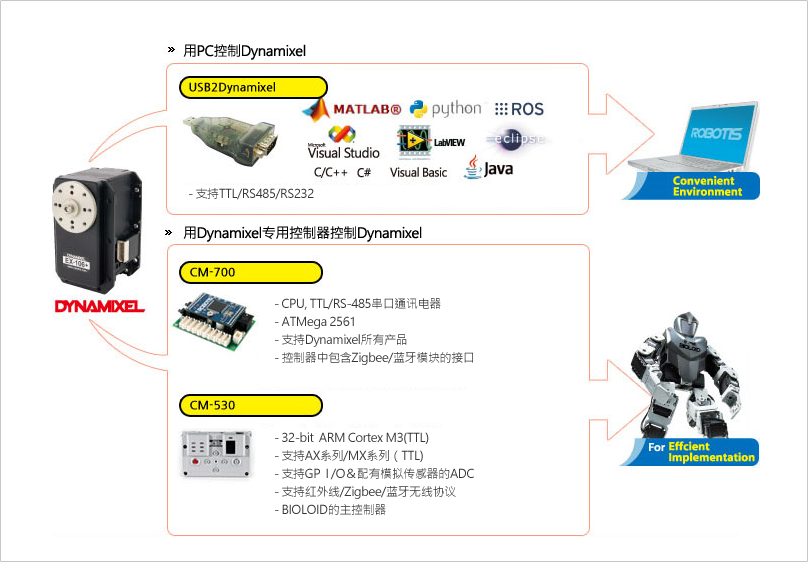
软件
RoboPlus
用这款专用软件,可以轻松设置,配置Dynamixel。Embeded C
用Embeded C解决方案,使用者可以亲自开发控制器固件。Dynamixel SDK
利用Dynamicel SDK标准程序设计库,开发控制Dynamixel的S/W.Zigbee SDK
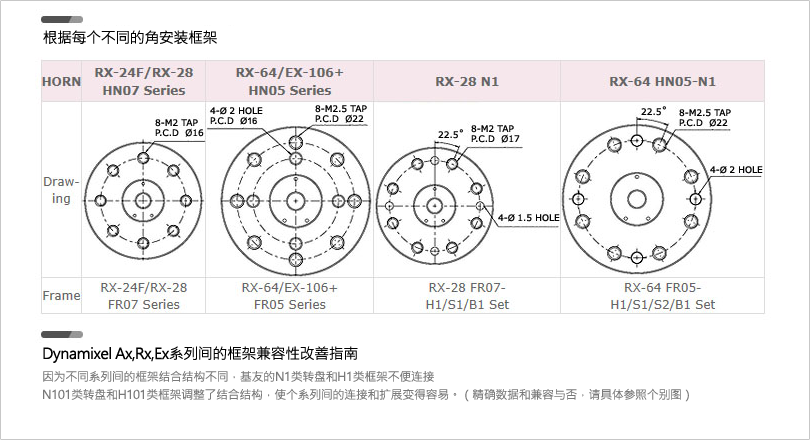
利用Zigbee SDK标准程序设计库,开发能与RoboPlus ask通信的的S/W.根据每个不同的角安装框架





 产品介绍
产品介绍